Given two point sets and in , the reduced polytope distance problem (RPD) is to find two density distributions over the input points, such that is minimized, here and for some constant . The idea of having the upperbound is to prevent excessive influence of an outlier point. The problem can be formatted as the following optimization problem:
| (RPD) | ||||
The RPD problem is equivalent to -SVM, but before we prove the equivalence of RPD and -SVM, we introduce an intermittent problem, the soft-margin maximization problem (S-Margin), which can be written as the following problem:
| (S-Margin) | ||||
Proof.
Consider the Lagrangian of (S-Margin):
The KKT condition for this problem is:
| Stationary: | |||
| Complementary: | |||
| Primal feasibility: | |||
| Dual feasibility: |
Take , the dual of (S-Margin) becomes:
Now we turn to the -SVM problem. The -SVM problem can be formatted as
| (-SVM) | ||||
Here is a parameter that is chosen by the user to control the slackness. Intuitively, this problem is equivalent to (S-Margin) by fixing and set , since maximizing the soft-margin is the same as fixing the offset and minimizing the norm of the normal vector . The formal proof is given in Theorem 2.
Theorem 2.
Proof.
Recall that is a KKT point of (S-Margin) if it satisfies:
| Stationary: | (1) | |||
| Complementary: | ||||
| Primal feasibility: | ||||
| Dual feasibility: |
Each KKT point of (-SVM) satisfies:
| Stationary: | (2) | |||
| Complementary: | ||||
| Primal feasibility: | ||||
| Dual feasibility: |
Assuming , set , and , and take , we have:
| Stationary: | (3) | |||
| Complementary: | ||||
| Primal feasibility: | ||||
| Dual feasibility: |
which coincides with (1), and implies that is a KKT point to (S-Margin). The assumption is from the strong duality of (S-Margin):
where we assume the objective value is strictly greater than 0, i.e. the reduced convex hulls are linear separable. ∎
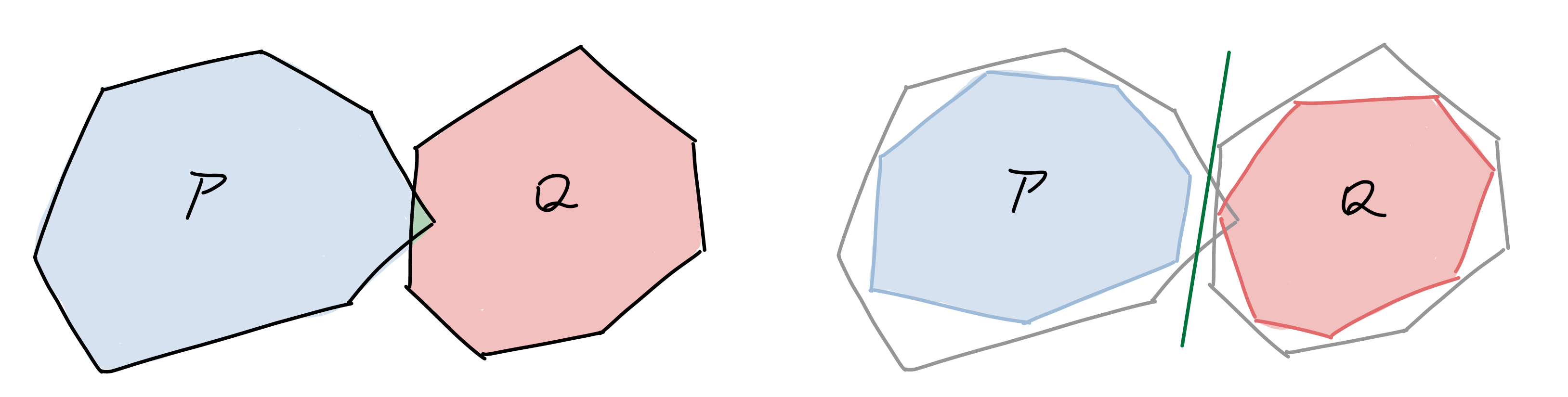
The figure below illustrates how the reduced polytope works. The left picture shows the original problem where the polytopes are not linearly separable, which corresponds to the parameter choice . The right picture shows an example of reduced polytope, where the reduced polytopes are linearly separable, and it corresponds to the case when the parameter .
References
- [1] (2000) Duality and geometry in svm classifiers. In ICML, Vol. 2000, pp. 57–64.
- [2] (2009) Coresets for polytope distance. In Proceedings of the twenty-fifth annual symposium on Computational geometry, pp. 33–42.